1. 复数和单位根
前置知识:弧度制,三角函数。
1.1 复数的引入
跳出实数域 \(\mathbb R\),我们定义 \(i ^ 2 = -1\),即 \(i = \sqrt {-1}\),并在此基础上定义 复数 \(a + bi\),其中将 \(b\neq 0\) 的称为 虚数。复数域记为 \(\mathbb C\)。
像这种从 \(a\) 变成 \(a + bx\) 的 扩域 操作并不少见,例如初中学习 “平方根” 时,经常用 \(a + b\sqrt x(x > 0)\) 表示一个数。这类数的加减乘都是容易的,除法即考虑平方差公式 \((c + d\sqrt x)(c – d\sqrt x) = c ^ 2 – d ^ 2x\),因此 \(\frac {a + b\sqrt x} {c + d\sqrt x} = \frac {(ac – bdx) + (bc – ad)\sqrt x} {c ^ 2 – d ^ 2 x}\)。
将 \(x\) 替换为 \(-1\),复数四则运算可由实数四则运算结合 \(i\) 的定义直接推广得到。
- 加法:\((a + bi) + (c + di) = (a + c) + (b + d)i\)。
- 减法:\((a + bi) – (c + di) = (a – c) + (b – d)i\)。
- 乘法:\((a + bi)(c + di) = (ac – bd) + (ad + bc)i\)。
- 除法:\(\frac {a + bi} {c + di} = \frac {(a + bi)(c – di)} {(c + di)(c – di)} = \frac {ac + bd} {c ^ 2 + d ^ 2} + \frac {bc – ad} {c ^ 2 + d ^ 2} i\)。
1.2 复平面与棣莫弗定理
描述一个复数 \(a + bi\) 需要两个值 \(a\) 和 \(b\),其中 \(a\) 表示 实部,\(b\) 表示 虚部。这启发我们将其放在平面直角坐标系上描述,称为 复平面。其在复平面上的坐标为 \((a, b)\),实部 \(a\) 为横坐标,虚部 \(b\) 为纵坐标。
一个复数唯一对应一个平面向量,因为它们都可以用有序实数对描述。将向量起点平移至原点,则其终点指向与其对应的复数。考虑平面向量的一些特征,如其长度与所在直线斜率。将这些概念应用在复数上,我们得到如下定义:
- 定义复数 \(z = a + bi\) 的 模 为 \(|z| = \sqrt {a ^ 2 + b ^ 2}\)。
- 定义复数 \(z = a + bi\) 的 辐角 为 \(\operatorname{Arg} z = \theta\),其中 \(\tan \theta = \frac b a\)。满足 \(-\pi < \theta \leq \pi\) 的 \(\theta\) 称为 辐角主值,记作 \(\operatorname{arg} z\),即 \(\operatorname{arg} z = \arctan \frac b a\)。
- 辐角确定了 \(z\) 所在直线,模确定了 \(z\) 在直线上的长度。对比实部和虚部,模和辐角主值以另一种有序实数对的形式描述复数。
根据 \(z = a + bi\) 的模 \(r\) 和辐角 \(\theta\),可知 \(z\) 的实部 \(a = r\cos \theta\),虚部 \(b = r \sin \theta\),据此定义复数的 三角形式 \(z = r(\cos \theta + i\sin \theta)\)。
利用 \(\cos\) 和 \(\sin\) 的和角公式可得 \(z_1z_2 = r_1r_2(\cos(\theta_1 + \theta_2) + i\sin (\theta_1 + \theta_2))\)。该等式称为 棣莫弗定理,它说明 复数相乘,模长相乘,辐角相加。
- 根据棣莫弗定理,我们得到对虚数单位 \(i\) 的一种直观理解:将一个复数 \(z\) 乘以 \(i\) 相当于将其 逆时针旋转 \(\frac {\pi} 2\) 弧度。实际上,考虑虚数单位 \(i\) 本身在复平面上的位置,发现就是 \(1\) 逆时针旋转 \(\frac {\pi} 2\) 度。一般地,有旋转的地方就有 \(i\) 存在,\(i\) 即旋转。推荐观看:虚数的来源 – Veritasium。
1.3 单位根的定义
当 \(r = 1\) 时,\(z = \cos\theta + i\sin\theta\) 在单位圆上。此时根据棣莫弗公式有 \(z ^ n = \cos(n\theta) + \sin(n\theta)\),它在 复数旋转 和 复数乘法 之间构建了桥梁:\(z\) 的 \(n\) 次幂相当于从 \((1, 0)\) 开始,以 \(z\) 的角度在单位圆上旋转 \(n\) 次得到的结果,称为将 \(z\) 旋转 \(n\) 次。
考虑将单位圆 \(n\) 等分(如下图),取任意 \(n\) 等分点 \(P_k(0\leq k < n)\),将其旋转 \(n\) 次均得到 \(1\),因为跨过的 \(\frac 1 n\) 单位圆弧数为 \(n\) 的倍数。这说明 \(P_k ^ n = 1\)。
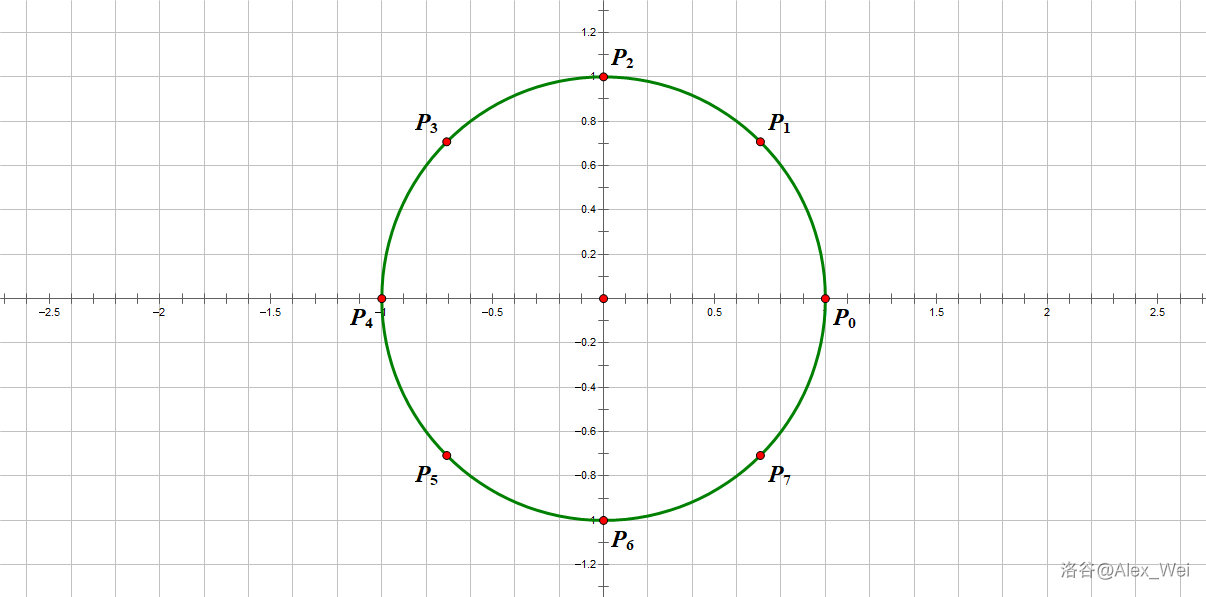
探究 \(P_k\) 的表达式:因为它相当于从 \(1\) 开始在单位圆上旋转 \(\frac {2k\pi} n\) 弧度,因此 \(P_k = \cos\left(\frac {2k\pi} n\right) + \sin\left(\frac {2k\pi} n\right)\)。我们称所有 \(P_k\) 为 \(n\) 次 单位根,将 \(P_1\) 记作 \(\omega_n\),则 \(P_k = P_1 ^ k = \omega_n ^ k\)。
根据 \(P_k ^ n = 1\) 可知任意 \(n\) 次单位根 \(\omega_n ^ k\) 均为 \(x ^ n – 1 = 0\) 的解。除特殊说明外,一般 \(n\) 次单位根直接代指 \(\omega_n\),即从 \(1\) 开始逆时针方向的第一个单位根。
可以观看 3b1b 的视频 从 6:00 到 7:30 的部分加深对上述内容的理解。
- 单位根的循环性:由 \(\omega_n ^ n = 1\) 单位根的指数可对 \(n\) 取模。换言之,考虑从 \(1\) 开始不断乘以 \(\omega_n\),我们将得到 \(1, \omega_n, \omega_n ^ 2, \cdots, \omega_{n} ^ {n – 1}, \omega_n ^ n = 1, \omega_n ^ {n + 1} = \omega_n, \cdots\),循环节为 \(n\)。想象从 \(1\) 开始不断旋转 \(\frac {2\pi} n\) 弧度,旋转 \(n\) 次后我们将落入循环。换言之,\(\omega_n ^ k = \omega_n ^ {k + tn}(t\in \mathbb Z)\)。
- \(\omega_n ^ k = \omega_{cn} ^ {ck}(c > 0)\)。对单位根有可视化认知后容易理解这一点。
- 当 \(n\) 为偶数时,将 \(\omega ^ k_n\) 取反相当于将其逆时针(或顺时针)转半圈,所以 \(-\omega_n ^ k = \omega_n ^ {k\pm \frac n 2}(2\mid n)\)。
- 单位根的对称性:因为 \(n\) 次单位根将单位圆 \(n\) 等分,均匀分布在圆周,所以它们的重心就在原点,即 \(\sum_{i = 0} ^ {n – 1} \omega_{n} ^ i = 0\)。
- 若 \(\gcd(k, n) = 1\),则 \(\omega_n ^ k\) 称为 本原单位根。所有本原单位根的 \(0\sim n – 1\) 次幂互不相同。
1.4 单位根与原根
前置知识:原根,详见 初等数论学习笔记 I:同余相关。
单位根和原根有极大的相似性,可以说原根就是模 \(P\) 下的整数域的单位根。
设 \(n = \varphi(P)\) 且 \(P\) 存在原根 \(g\),则 \(g ^ 0, g ^ 1, \cdots, g ^ {n – 1}, g ^ n = g ^ 0, g ^ {n + 1} = g ^ 1\) 这样的循环和 \(n\) 次单位根的循环一模一样。这使得在模 \(P\) 意义下涉及 \(n\) 次单位根运算时,可直接用原根 \(g\) 代替。进一步地,对于 \(d\mid n\),\(g ^ {\frac n d}\) 可直接代替模 \(P\) 意义下的 \(d\) 次单位根。
- 单位根和原根都是对应域上一个大小为 \(n = \varphi(P)\) 的 循环群 的 生成元。它们均满足 \(n\) 次幂是对应域的单位元,且它们的 \(0\sim n – 1\) 次幂互不相同。换言之,它们 同构。
快速傅里叶变换 FFT 和快速数论变换 NTT 的联系恰在于此。
1.5 欧拉公式
前置知识:自然对数 \(\ln\) 的底数 \(e\) 及其相关性质。
这部分为接下来可能用到的符号做一些补充。
欧拉公式指出
\[e ^ {ix} = \cos x + i\sin x\]
即单位圆上从 \((1, 0)\) 开始旋转 \(x\) 弧度得到的复数,也即大小为 \(x\) 的角的终边与单位圆的交点。
欧拉公式的严谨证明超出了讨论范围,相关资料可以参考百度百科。我们给出一个对欧拉公式的感性理解方式,以加深读者对欧拉公式的直观印象与理解,来自 在 3.14 分钟内理解 \(e ^ {i\pi}\) – 3Blue1Brown。这个视频相当有启发性。
根据 \((e ^ t)’ = e ^ t\),考虑 \(e ^ t\) 随着 \(t\) 增大在数轴上的取值。\(e ^ t\) 以每秒钟 \(t\) 均匀增加 \(1\) 的速度向数轴正方向移动,则 \(e ^ t\) 的速度就是它本身的位置。它的起始点为 \(e ^ 0 = 1\)。
根据 \((e ^ {kt})’ = ke ^ t\),类似可知 \(e ^ {kt}\) 的速度等于 \(k\) 倍它本身的位置。
当 \(k = i\) 时,速度相当于将本身的位置逆时针旋转 \(\frac {\pi} 2\) 弧度,与位置垂直。这样,根据基础的高中物理知识,我们知道 \(e ^ {it}\) 随着 \(t\) 增大,在单位圆上做匀速圆周运动,且每秒移动 \(1\) 弧度。
这样,\(e ^ {it}\) 就等于模长为 \(1\),辐角为 \(t\) 的复数,即 \(\cos t + i\sin t\)。这使得我们可以用 \(r e ^ {i\theta}\) 描述模长为 \(r\),辐角为 \(\theta\) 的复数,记号变得更简洁。
将该表示法应用至单位根,可知 \(\omega_n = e ^ {\frac {2\pi i} n}\)。
读者应当在 \(re ^ {i\theta}\),\(r(\cos\theta + i\sin \theta)\) 及其在复平面上的位置建立直观联系,有助于理解接下来的内容。
带入 \(t = \pi\),得到著名等式
\[e ^ {i\pi} = -1\]
带入 \(t = 2\pi = \tau\),得
\[e ^ {i\tau} = 1\]
这说明对于任意 \(k\in \mathbb Z\),\((e ^ {2\pi i}) ^ {k + \frac t n}\) 相等恰对应 \(\omega_n ^ {kn + t}\) 相等。
2. 多项式2.1 基本概念
形如 \(\sum_{i = 0} ^ n a_ix ^ i\) 的 有限和式 称为 多项式,记作 \(f(x) = \sum_{i = 0} ^ n a_i x ^ i\)。其中,\(a_i\) 称为 \(i\) 次项的 系数,也称 \(x ^ i\) 前的系数,记作 \([x ^ i]f(x)\)。超出最高次数 \(n\) 的系数 \(a_i(i > n)\) 视作 \(0\)。
当项数无限时,和式形如 \(\sum_{i = 0} ^ {\infty} a_ix ^ i\),称为 形式幂级数,它暂时超出了我们的讨论范围。
- 多项式 系数非零 的最高次项的次数称为该多项式的 度,也称次数,记作 \(\deg f\)。如 \(f(x) = \sum_{i = 0} ^ n a_i x ^ i\) 其中 \(a_n \neq 0\),则 \(f\) 为 \(n\) 次多项式,记作 \(\deg f = n\)。
- 使得 \(f(x) = 0\) 的所有 \(x\) 称为多项式的 根。
- 若 \(a_i\) 均为实数,则称 \(f\) 为实系数多项式。若 \(a_i\) 可以均为复数,则称 \(f\) 为复系数多项式。
- 代数基本定理:任何非零一元 \(n\) 次复系数多项式恰有 \(n\) 个复数根。这些复数根可能重合。证明略。
2.2 系数表示法和点值表示法
\(f(x) = \sum_{i = 0} ^ n a_i x ^ i\) 给出了所有 \(i\) 次项前的系数,这种描述多项式的方法称为 系数表示法。
将 \(x = x_i\) 带入,得到 \(y_i = f(x_i)\),称 \((x_i, y_i)\) 为 \(f\) 在 \(x_i\) 处的点值。用若干点值 \((x_i, y_i)\) 描述多项式的方法称为 点值表示法。
考虑这两种表示法之间的联系。我们尝试探究在给定 \(n\) 个点值 \((x_0, y_0), (x_1, y_1), \cdots, (x_{n – 1}, y_{n – 1})\) 其中 \(x_i\) 互不相同时,所唯一确定的多项式的最高次数。
一个自然的猜测是 \(n – 1\),因为 \(n – 1\) 次多项式需要 \(n\) 个系数描述,具有 \(n\) 单位信息,而 \(n\) 个点值同样具有 \(n\) 单位信息。
证明即考虑直接带入,得到 \(n\) 元线性方程组:对于任意 \(0\leq j < n\),\(\sum_{i = 0} ^ {n – 1} a_ix_j ^ i = y_j\)。该线性方程组的系数矩阵为
\[\begin{bmatrix}1 & x_0 & x_0 ^ 1 & \cdots & x_0 ^ {n – 1} \\1 & x_1 & x_1 ^ 1 & \cdots & x_1 ^ {n – 1} \\1 & x_2 & x_2 ^ 1 & \cdots & x_2 ^ {n – 1} \\\vdots & \vdots & \vdots & \ddots & \vdots \\1 & x_{n – 1} & x_{n – 1} ^ 2 & \cdots & x_{n – 1} ^ {n – 1} \\\end{bmatrix}\]
因 \(x_i\) 互不相同,所以该范德蒙德矩阵的行列式非零,方程组有唯一解。类似的,从线性方程组的角度出发,容易证明 \(n\) 个点值不可能唯一确定 \(n\) 次或更高次的多项式。
综上,我们得到重要结论:\(n\) 个点值唯一确定的多项式最高次数为 \(n – 1\)。
- 从系数表示法转为点值表示法称为 求值(Evaluation)。
- 从点值表示法转为系数表示法称为 插值(Interpolation)。
2.3 多项式运算2.3.1 基本运算
设 \(f(x) = \sum_{i = 0} ^ n a_i x ^ i\),\(g(x) = \sum_{i = 0} ^ m b_i x ^ i\)。
- 设 \(h = f + g\),则 \(h(x) = (\sum_{i = 0} ^ n a_i x ^ i) + (\sum_{j = 0} ^ m b_j x ^ j) = \sum_{i = 0} ^ {\max(n, m)} (a_i + b_i) x ^ i\),可知两多项式相加,对应系数相加,\(\deg (f + g) = \max(\deg f, \deg g)\)。
- 设 \(h = f * g\),则 \(h(x) = (\sum_{i = 0} ^ n a_i x ^ i)(\sum_{j = 0} ^ m b_j x ^ j) = \sum_{i = 0} ^ {n + m} (\sum_{j = 0} ^ i a_jb_{i – j}) x ^ i\),可知两多项式相乘,每两个系数相乘贡献至次数之和的系数,\(\deg(f * g) = \deg f + \deg g\)。
因此,在系数表示法下,计算两个多项式相加的复杂度为 \(\mathcal{O}(n + m)\),计算两个多项式相乘的复杂度为 \(\mathcal{O}(nm)\)。
根据 \((f + g)(x) = f(x) + g(x)\),可知两个多项式相加时,对应点值相加。
根据 \((fg)(x) = f(x) g(x)\),可知两个多项式相乘时,对应点值相乘。
因此,在点值表示法下,计算两个多项式相加需要 \(\max(n, m) + 1\) 个点值,计算两个多项式相乘需要 \(n + m + 1\) 个点值,复杂度均为 \(\mathcal{O}(n + m)\)。
- 用 \(f * g\) 和 \(fg\) 表示多项式相乘,即进行加法卷积;用 \(f \cdot g\) 表示多项式 点乘,即 对应系数相乘。
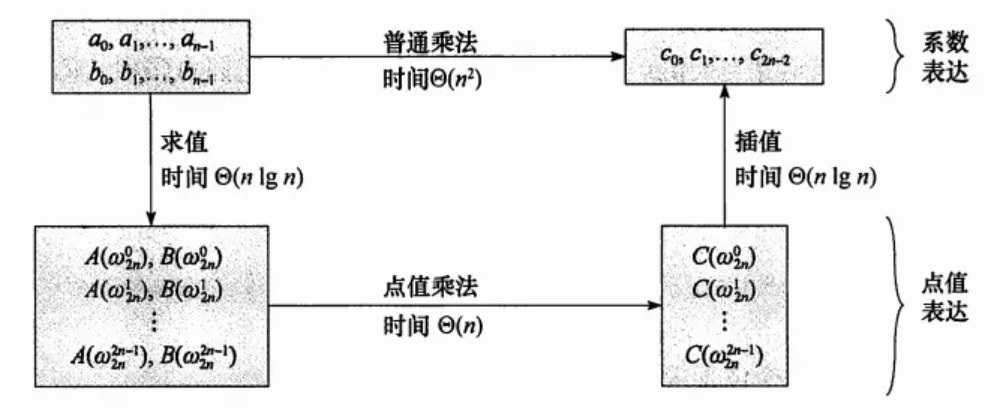
在系数表示法下计算两个多项式相乘,我们首先将其转化为点值表示法,相乘后再转回系数表示法。时间复杂度 \(\mathcal{O}((n + m)\log (n + m))\)。相关算法将在第四章介绍。
3. 拉格朗日插值
在 2.2 小节我们得到结论:\(n\) 个点值唯一确定的多项式最高次数为 \(n – 1\)。那么,如何在点值表示法和系数表示法之间快速转换呢?
从系数表示法转为点值表示法,最常用的方法是直接带入,时间复杂度 \(\mathcal{O}(n ^ 2)\)。\(\mathcal{O}(n\log ^ 2 n)\) 的多项式多点求值则需要高级多项式技巧,此处不作介绍。
从点值表示法转为系数表示法,最直接的方法是高斯消元,时间复杂度 \(\mathcal{O}(n ^ 3)\)。接下来我们将介绍常用的拉格朗日插值法。
3.1 算法详解
拉格朗日插值的核心思想在于利用点值的可加性,每次只考虑一个点值,其它点值均视为 \(0\),由此构造 \(n\) 个多项式 \(f_i(x)\),使得它们在 \(x_i\) 处取值为 \(y_i\),\(x_j(j\neq i)\) 处取值为 \(0\),则 \(f = \sum_{i = 0} ^ {n – 1} f_i\)。中国剩余定理 使用了类似的思想。
为了让 \(f_i(x_j) = 0\ (i\neq j)\),\(f_i\) 应包含 \(x – x_j\) 作为因式,因此设 \(f_i(x) = \prod_{i \ne j} (x – x_j)\)。但是此时 \(f_i(x_i)\) 不一定等于 \(y_i\),我们发现可以调整 \(f_i\) 的系数,给 \(f_i\) 乘上 \(\frac {y_i} {f_i(x_i)}\)。综上,我们得到 \(f_i\) 的表达式
\[f_i(x) = y_i \prod_{j \neq i} \frac {x – x_j} {x_i – x_j}\]
对 \(f_i\) 求和得 \(f\),我们得到拉格朗日插值公式
\[f(x) = \sum\limits_{i = 0} ^ {n – 1} y_i \prod\limits_{j \neq i} \frac {x – x_j} {x_i – x_j}\]
为得到 \(f\) 的各项系数,只需 \(\mathcal{O}(n ^ 2)\) 求出 \(F(x) = \prod_{i = 0} ^ {n – 1} (x – x_i)\),对每个 \(i\) 暴力 \(\mathcal{O}(n)\) 将 \(F\) 除掉一次式 \(x – x_i\) 算出 \(\frac {F(x)} {x – x_i}\) 的各项系数,再乘以 \(\frac {y_i} {\prod_{j \neq i} x_i – x_j}\) 得到 \(f_i\),则 \(f = \sum_{i = 0} ^ {n – 1} f_i\)。时间复杂度 \(\mathcal{O}(n ^ 2)\)。
通常情况下,题目要求我们求出 \(F(x)\) 在给定某个 \(x\) 处的取值,此时我们不把 \(x\) 看做函数的元,而是直接将 \(x\) 带入上式。时间复杂度仍为 \(\mathcal{O}(n ^ 2)\)。
多项式快速插值在 \(\mathcal{O}(n\log ^ 2 n)\) 的时间内将点值表示法转化为系数表示法,这超出了我们的讨论范围。
3.2 连续取值插值
当给定点值横坐标为连续整数时,我们有快速单点插值的方法。
以 \(0, 1, \cdots, n – 1\) 即 \(x_i = i\) 为例:
\[\begin{aligned}f(x) = \sum\limits_{i = 0} ^ {n – 1} y_i \prod\limits_{j \neq i} \frac {x – j} {i – j} \\\end{aligned}\]
分子是 \(\prod (x – i)\) 挖掉一个项,经典维护前缀后缀积。设 \(p_i = \prod_{j = 0} ^ {i – 1} x – j\),\(s_i = \prod_{j = i + 1} ^ {n – 1} x – j\)。
分母对于 \(i > j\),\(\prod_{j = 0} ^ {i – 1} (i – j) = i!\)。对于 \(i < j\),\(\prod_{j = i + 1} ^ {n – 1} (i – j) = (-1)(-2) \cdots (i – n + 1)\),将所有负号提出来,得 \((-1) ^ {n – i + 1}(i – n + 1)!\)。
因此
\[f(x) = \sum\limits_{i = 0} ^ {n – 1} y_i \frac {p_is_i} {(-1) ^ {n – i + 1} i! (i – n + 1)!}\]
预处理阶乘逆元,时间复杂度 \(\mathcal{O}(n)\)。
3.3 应用
- 计算范德蒙德方阵的逆矩阵,详见 4.4.1 小节。
3.4 例题P4781 【模板】拉格朗日插值
#include using namespace std;constexpr int N = 2e3 + 5;constexpr int mod = 998244353;int ksm(int a, int b) { int s = 1; while(b) { if(b & 1) s = 1ll * s * a % mod; a = 1ll * a * a % mod, b >>= 1; } return s;}int n, k, ans, x[N], y[N];int main() { cin >> n >> k; for(int i = 1; i > x[i] >> y[i]; for(int i = 1; i <= n; i++) { int deno = 1, nume = 1; for(int j = 1; j <= n; j++) { if(i == j) continue; deno = 1ll * deno * (x[i] + mod - x[j]) % mod; nume = 1ll * nume * (k + mod - x[j]) % mod; } ans = (ans + 1ll * y[i] * nume % mod * ksm(deno, mod - 2)) % mod; } cout << ans << "\n"; return 0;}4. 快速傅里叶变换
快速傅里叶变换(Fast Fourier Transform,FFT)是多项式算法的根基。想要真正理解它,必须先真正理解单位根,还需要对线性代数有基本了解。
推荐观看:
- 这个算法改变了世界 – Veritasium。
- The Fast Fourier Transform (FFT): Most Ingenious Algorithm Ever? – Reducible & B 站搬运。
4.1 求值的本质
设 \(f(x) = \sum_{i = 0} ^ {n – 1} a_i x ^ i\),将 \(x_0\) 带入,得 \(f(x_0) = \sum_{i = 0} ^ {n – 1} a_i x_0 ^ i\)。考虑将其写成向量内积(点积)的形式:
\[f(x_0) = \sum_{i = 0} ^ {n – 1} a_i x_0 ^ i =\begin{bmatrix}x_0 ^ 0 & x_0 ^ 1 & \cdots & x_0 ^ {n – 1}\end{bmatrix}\times\begin{bmatrix}a_0 \\ a_1 \\ \vdots \\ a_{n – 1}\end{bmatrix}\]
这样,如果有 \(x_0, x_1, \cdots, x_{m – 1}\) 需要求值,整个过程就可以写成 \(m\times n\) 维矩阵乘以 \(n\) 维列向量的形式:
\[\begin{bmatrix}x_0 ^ 0 & x_0 ^ 1 & \cdots & x_0 ^ {n – 1} \\x_1 ^ 0 & x_1 ^ 1 & \cdots & x_1 ^ {n – 1} \\\vdots & \vdots & \ddots & \vdots \\x_{m – 1} ^ 0 & x_{m – 1} ^ 1 & \cdots & x_{m – 1} ^ {n – 1} \\\end{bmatrix}\times\begin{bmatrix}a_0 \\ a_1 \\ \vdots \\ a_{n – 1}\end{bmatrix}= \begin{bmatrix}f(x_0) \\ f(x_1) \\ \vdots \\ f(x_{m – 1})\end{bmatrix}\]
左侧矩阵就是著名的 范德蒙德矩阵。
当 \(m = n\) 时为范德蒙德方阵,\(x_i\) 互不相同时其逆存在,帮助我们快速从点值表示法转回系数表示法。\(m > n\) 时任取 \(x_i\) 互不相同的 \(n + 1\) 行可以求逆。\(m < n\) 时无法还原系数。这体现出 \(n + 1\) 个点值唯一确定最高次数不超过 \(n\) 的多项式。
朴素计算求值的复杂度为 \(\mathcal{O}(nm)\),因为带入求值一次的复杂度为 \(\mathcal{O}(n)\)。快速傅里叶变换即在离散傅里叶变换基础上通过选取合适的 \(x_i\),使得可以快速求值。
4.2 离散傅里叶变换
在介绍 FFT 之前,我们先给出离散傅里叶变换(Discrete Fourier Transform,DFT)的概念。
DFT 在工程中是将离散信号从时域转为频域的过程。碰巧的是,其表达式刚好可以用来对多项式进行多点求值,只不过这些点值是固定的 单位根 处的点值,但对于求值做多项式乘法已经足够了。
DFT 将一个长度为 \(N\) 的复数序列 \(x_0, x_1, \cdots, x_{N – 1}\) 通过如下公式转化为另一个长为 \(N\) 的复数序列 \(X_0, X_1, \cdots, X_{N – 1}\):
\[X_k = \sum_{n = 0} ^ {N – 1} x_n e ^ {-\frac {2\pi i} Nkn}\]
也即
\[X_k = \sum_{n = 0} ^ {N – 1} x_n \omega_N ^ {-kn}\]
设多项式 \(f(x) = \sum_{n = 0} ^ {N – 1} x_n x ^ i\),易知
\[X_k = \sum_{n = 0} ^ {N – 1} x_n(\omega_N ^ {-k}) ^ n = f(\omega_N ^ {-k})\]
根据上式,离散傅里叶变换可以看成多项式 \(f(x) = \sum_{n = 0} ^ {N – 1} x_nx ^ i\) 在 \(N\) 个单位根处求值。
没看懂?没关系。接下来我们将从另一角度出发,得到一个差别微小但更容易理解的算法 —— FFT。
4.3 算法详解
首先我们得搞清楚,DFT 是一个变换,而 FFT 是用于实现 DFT 的算法。在 FFT 的推导过程中,其所实现的变换和 DFT 变换有细微的差别,因此笔者也用 FFT 表示该算法实现的变换。
按理说学习一个算法时需要搞清楚它的用途,但如果直接从 DFT 角度入手尝试简化流程,那么为了让动机看起来自然,我们还要先学习 DFT 的实际含义,这涉及到大量前置知识。
但是,从计算机科学界尤为重要且为各位 OIer 熟知的多项式乘法的优化出发,我们通过自然推理得到一个算法,而该算法恰好可以快速实现 DFT(有一些细小的差别,详见 4.3.5)。
我们明确接下来的目标:给定次数 \(n – 1\) 的多项式 \(f(x) = \sum_{i = 0} ^ {n – 1} a_i x ^ i(a_{n – 1} \neq 0)\),快速求出它的至少 \(n\) 个点值。
下文中,\(f(x)\) 也被视为关于 \(x\) 的 \(n – 1\) 次函数。
4.3.1 简化情况
解决一个普遍性的问题,最重要的思想就是 从简化情况入手,分析问题的性质。
函数的性质无非就那几个:奇偶性,单调性,周期性等。一般函数没有单调性和周期性,但总可以表示为一个偶函数和一个奇函数之和,这一定是突破点。
对于偶函数 \(f(x)\),即所有奇数次项系数为 \(0\),带入两个相反数 \(w\) 和 \(-w\) 时,它们的值相等。
对于奇函数 \(f(x)\),即所有偶数次项系数为 \(0\),带入两个相反数 \(w\) 和 \(-w\) 时,它们的值互为相反数。
因此,将任意多项式 \(f(x)\) 拆成偶函数 \(f_e(x)\) 和奇函数 \(f_o(x)\) 之和,则
\[\begin{cases}f(x) = f_e(x) + f_o(x) \\f(-x) = f_e(x) – f_o(x)\end{cases}\]
选择 \(\lceil\frac n 2\rceil\) 对两两互为相反数的值 \((x_i, -x_i)\) ,求出所有 \(x_i\) 在 \(f_e(x)\) 和 \(f_o(x)\) 处的取值。
不妨设 \(n\) 为偶数,则 \(f_e\) 是 \(n – 2\) 次多项式,\(f_e\) 是 \(n – 1\) 次多项式,本质上依然相当于求出 \(n – 1\) 次多项式的 \(n\) 个点值,对时间复杂度没有优化。
但是 \(f_e\) 和 \(f_o\) 的项数减半,尝试利用该性质。
因为 \(f_e\) 只有偶数次项 \(a_0x ^ 0 + a_2x ^ 2 + \cdots\),故考虑换元 \(u = x ^ 2\),则 \(f_e(u) = a_0u ^ 0 + a_2 u ^ 1 + \cdots\)。换言之,我们设 \(f’_e(x) = a_0x ^ 0 + a_2x ^ 1 + \cdots\),则 \(f_e(x) = f’_e(x ^ 2)\)。
同理,从 \(f_o\) 中提出一个 \(x\),设 \(f’_o(x) = a_1x ^ 0 + a_3x ^ 1 + \cdots\),则 \(f_o(x) = xf’_o(x ^ 2)\)。
因此,
\[\begin{cases}f(x) = f’_e(x ^ 2) + xf’_o(x ^ 2) \\f(-x) = f’_e(x ^ 2) – xf’_o(x ^ 2)\end{cases}\]
这样才是真正意义上的规模减半。若问题可递归,则时间复杂度为 \(T(n) = 2T\left(\frac n 2\right) + \mathcal{O}(n)\),解得 \(T(n) = \mathcal{O}(n\log n)\)。
4.3.2 引入单位根
问题来了,如何保证递归得到的问题也满足两两互为相反数呢?
考虑一开始的 \((x_i, -x_i)\),这说明存在 \(i’\) 使得 \(x_i ^ 2 = -x_{i’} ^ 2\),它们互不相同但它们的 \(4\) 次方相等。
进一步推演,因为问题会递归 \(w = \lceil\log_2 n\rceil\) 层,所以我们需要找到 \(k = 2 ^ w\) 个互不相等的 \(x\),但它们的 \(k\) 次幂相等。这个相等的 \(k\) 次幂可以任意选择,方便起见设为 \(1\),则 \(x ^ k = 1\),\(x\) 为所有 \(k\) 次单位根。
逆推得到结果后,我们再顺着检查一遍:初始令 \(x\) 为所有 \(k\) 次单位根,每层递归会将这些数平方,得到所有 \(\frac k 2, \frac k 4 \cdots\) 次单位根。因为 \(\frac k 2, \frac k 4, \cdots\) 都是偶数,所以它们可以两两正负配对,直到递归 \(w\) 层的平凡情况:\(\frac k {2 ^ w} = 1\) 次单位根即 \(x = 1\)。
由此可得通常使用(补齐到 \(2\) 的幂)的快速傅里叶变换的范德蒙德方阵形式:
\[\begin{bmatrix}(\omega_n ^ 0) ^ 0 & (\omega_n ^ 0) ^ 1 & \cdots & (\omega_n ^ 0) ^ {n – 1} \\(\omega_n ^ 1) ^ 0 & (\omega_n ^ 1) ^ 1 & \cdots & (\omega_n ^ 1) ^ {n – 1} \\\vdots & \vdots & \ddots & \vdots \\(\omega_n ^ {n – 1}) ^ 0 & (\omega_n ^ {n – 1}) ^ 1 & \cdots & (\omega_n ^ {n – 1}) ^ {n – 1} \\\end{bmatrix}\times\begin{bmatrix}a_0 \\ a_1 \\ \vdots \\ a_{n – 1}\end{bmatrix}= \begin{bmatrix}f(\omega_n ^ 0) \\ f(\omega_n ^ 1) \\ \vdots \\ f(\omega_n ^ {n – 1})\end{bmatrix}\]4.3.3 递归公式
得到大致框架后,我们具体地描述整个算法流程:
首先将 \(n\) 补齐到不小于 \(n\) 的最小的 \(2\) 的幂,即 \(2 ^ {\lceil \log_2 n\rceil}\)。
设当前需要求值的多项式 \(f\) 长度为 \(L(L = 2 ^ w, w\in \mathbb N)\),若 \(L = 1\) 则直接返回 \(a_0\)。否则我们需求出 \(f(x)\) 在所有 \(L\) 次单位根 \(\omega_L ^ k(0\leq k < L)\) 处的取值。
将 \(f(x)\) 写成 \(f_e(x ^ 2) + xf_o(x ^ 2)\),则对于 \(0\leq k < \frac L 2\),有
\[\begin{aligned}f(\omega_L ^ k) & = f_e(\omega_L ^ {2k}) + \omega_L ^ k f_o(\omega_L ^ {2k}) \\f(\omega_L ^ {k + \frac L 2}) & = f_e(\omega_L ^ {2k + L}) + \omega_L ^ {k + \frac L 2} f_o(\omega_L ^ {2k + L})\end{aligned}\]
根据单位根的性质(在单位根部分有介绍):
- \(\omega_n ^ k = \omega_{2n} ^ {2k}\)。
- \(\omega_n ^ k = \omega_n ^ {k + tn}(t\in \mathbb Z)\)。
- \(\omega_{n} ^ k = -\omega_{n} ^ {k + \frac n 2} (2\mid n)\)。
得
\[\begin{aligned}f(\omega_L ^ k) & = f_e(\omega_{\frac L2} ^ {k}) + \omega_L ^ k f_o(\omega_{\frac L 2} ^ {k}) \\f(\omega_L ^ {k + \frac L 2}) & = f_e(\omega_{\frac L2} ^ {k}) – \omega_L ^ k f_o(\omega_{\frac L 2} ^ {k})\end{aligned}\]
这样,我们只需求出 \(\frac L 2\) 次多项式 \(f_e\) 和 \(f_o\) 在所有 \(\frac L 2\) 次单位根处的取值。
4.3.4 蝴蝶变换
递归处理比较慢,我们希望像位运算卷积一样通过递推实现整个过程。
因为在边界条件下,每个位置的取值与其对应的系数相关,所以递归转递推的关键在于考察系数的变化。
考虑 \(n = 8\) 的情况,初始为 \((a_0, a_1, a_2, a_3, a_4, a_5, a_6, a_7)\)。
进行第一层递归时,将 \(f_e\) 的系数写在左半部分,\(f_o\) 的系数写在右半部分,得 \((a_0, a_2, a_4, a_6), (a_1, a_3, a_5, a_7)\)。
进行第二层递归时,类似地将每个子问题的 \(f_e\) 和 \(f_o\) 的系数分别写在左右两侧,得 \((a_0, a_4), (a_2, a_6), (a_1, a_5), (a_3, a_7)\)。
进行第三层递归时,共有 \(4\) 个大小为 \(2\) 的子问题,且进行上述操作后系数的位置不发生改变。
我们看到,如果一个系数在规模为 \(2n\) 的问题中的位置为 \(p\),若 \(p\) 是偶数,则递归至左半部分,若 \(p\) 是奇数,则递归至右半部分,且在规模为 \(n\) 的问题中的位置为 \(\left\lfloor \frac p 2\right\rfloor\)。
进一步地,一个系数在第 \(i\) 次递归时的方向决定了它最终下标在二进制下第 \(w – i(n = 2 ^ w)\) 位的取值。若向左递归则为 \(0\),向右递归则为 \(1\)。而它递归的方向又受到 \(\left\lfloor \frac p {2 ^ {i – 1}}\right\rfloor\) 的奇偶性的影响,即 \(p\) 在二进制下第 \(i\) 位的取值,若为 \(0\) 则向左递归,为 \(1\) 则向右递归。
这就说明,\(p\) 在二进制下第 \(i\) 位的取值,等于它对应的系数的最终下标在二进制下第 \(w – i\) 位的取值。
因此我们断言,系数 \(a_p\) 在 \(w\) 次递归后的下标等于 \(p\) 二进制翻转后的值,设为 \(r_p\)。这里翻转指翻转第 \(0\sim w – 1\) 位的值。
\(r_p\) 可递推求得:\(r_0 = 0\)。对于 \(r_i(i > 0)\),先右移一位得到 \(i’ = \left\lfloor \frac i 2\right\rfloor\),则 \(r_i\) 的低 \(w – 1\) 位(第 \(0\sim w – 2\) 位)的值可由 \(r_{i’}\) 右移一位得到。第 \(w – 1\) 位的值只需检查 \(i\) 的奇偶性。因此,\(r_i = \left\lfloor \frac {r_{i’}}{2} \right\rfloor + \frac n 2(i\bmod 2)\),其中 \(i’ = \lfloor \frac i 2\rfloor\)。
因此,在算法一开始先对系数数组 \(a\) 执行 蝴蝶变换,即同时令 \(a_i \to a_{r_i}\),然后类似 FWT,枚举问题规模 \(2d(1\le d < n)\),枚举每个子问题 \(2di(0\leq 2di < n)\),再枚举当前子问题的所有对应位置 \((x = 2di + k, y = 2di + k + d)(0\leq k < d)\) 执行变换,即设 \(x\) 和 \(y\) 对应位置的当前值为 \(f_x\) 和 \(f_y\),则 \(f’_x = f_x + \omega_{2d} ^ k f_y\),\(f’_y = f_x – \omega_{2d} ^ k f_y\)。
进一步地,根据 \(r\) 的定义,我们有 \(r_{r_i} = i\)。因此,执行蝴蝶变换只需对所有 \(i < r_i\) 执行 \(\mathrm{swap}(a_i, a_{r_i})\)。
这就是 FFT,整个过程称为 对多项式 \(f\) 做长度为 \(n\) 的快速傅里叶变换,时间复杂度 \(\mathcal{O}(n\log n)\)。代码在 4.5 小节。
4.3.5 DFT 和 FFT
对比 DFT 和 FFT 矩阵:
\[\mathcal {F_D} =\begin{bmatrix}(\omega_N ^ 0) ^ 0 & (\omega_N ^ 0) ^ 1 & \cdots & (\omega_N ^ 0) ^ {N – 1} \\(\omega_N ^ {-1}) ^ 0 & (\omega_N ^ {-1}) ^ 1 & \cdots & (\omega_N ^ {-1}) ^ {N – 1} \\\vdots & \vdots & \ddots & \vdots \\(\omega_n ^ {-(N – 1)}) ^ 0 & (\omega_n ^ {-(N – 1)}) ^ 1 & \cdots & (\omega_N ^ {-(N – 1)}) ^ {N – 1} \\\end{bmatrix}\\\mathcal {F_F} = \begin{bmatrix}(\omega_n ^ 0) ^ 0 & (\omega_n ^ 0) ^ 1 & \cdots & (\omega_n ^ 0) ^ {n – 1} \\(\omega_n ^ 1) ^ 0 & (\omega_n ^ 1) ^ 1 & \cdots & (\omega_n ^ 1) ^ {n – 1} \\\vdots & \vdots & \ddots & \vdots \\(\omega_n ^ {n – 1}) ^ 0 & (\omega_n ^ {n – 1}) ^ 1 & \cdots & (\omega_n ^ {n – 1}) ^ {n – 1} \\\end{bmatrix}\]
可以发现 DFT 和 FFT 基本一致,它们的差别在于:
- 朴素 FFT 要求 \(n\) 是 \(2\) 的幂,但 DFT 序列长度可以是任意正整数。
- DFT 和 FFT 带入单位根的顺序是相反的。
注意这些细微差别,不要把 DFT 和 FFT 搞混了。
4.3.6 循环卷积4.4 离散傅里叶逆变换
离散傅里叶逆变换(Inverse Discrete Fourier Transform,IDFT)可以视为单位根处插值的过程。即给出 \(n = 2 ^ w\) 个在所有 \(n\) 次单位根处的点值 \(P_k = (\omega_n ^ k, f(\omega_n ^ k))(0\leq k < n)\),要求还原 \(f\) 的各项系数,其中 \(f\) 的次数不大于 \(n – 1\)。
类似地,IDFT 和 IFFT 之间也存在一些差异。想必各位读者根据之前的内容已经可以猜出这种差异是什么了。
4.4.1 范德蒙德方阵逆
考虑范德蒙德方阵
\[\mathcal A = \begin{bmatrix}x_0 ^ 0 & x_0 ^ 1 & \cdots & x_0 ^ {n – 1} \\x_1 ^ 0 & x_1 ^ 1 & \cdots & x_1 ^ {n – 1} \\\vdots & \vdots & \ddots & \vdots \\x_{n – 1} ^ 0 & x_{n – 1} ^ 1 & \cdots & x_{n – 1} ^ {n – 1} \\\end{bmatrix}\]
这玩意怎么求逆?我们考虑最暴力的方法:拉格朗日插值!
因为范德蒙德方阵可以看成多项式多点求值,根据
\[\begin{bmatrix}x_0 ^ 0 & x_0 ^ 1 & \cdots & x_0 ^ {n – 1} \\x_1 ^ 0 & x_1 ^ 1 & \cdots & x_1 ^ {n – 1} \\\vdots & \vdots & \ddots & \vdots \\x_{n – 1} ^ 0 & x_{n – 1} ^ 1 & \cdots & x_{n – 1} ^ {n – 1} \\\end{bmatrix}\times\begin{bmatrix}a_0 \\ a_1 \\ \vdots \\ a_{n – 1}\end{bmatrix}= \begin{bmatrix}f(x_0) \\ f(x_1) \\ \vdots \\ f(x_{n – 1})\end{bmatrix}\]
再结合拉格朗日插值公式
\[f(x) = \sum\limits_{i = 0} ^ {n – 1} f(x_i) \prod\limits_{j \neq i} \frac {x – x_j} {x_i – x_j}\]
可知从 \(f(x_j)\) 贡献到 \(a_i\) 的系数为 \((\mathcal{A} ^ {-1})_{ij} = [x ^ i] \prod_{k\neq i} \frac {x – x_k} {x_j – x_k}\)。
这就是范德蒙德方阵逆当中每个元素的表达式。
4.4.2 算法介绍
很显然,\(f\) 在经过快速傅里叶变换后,再进行快速傅里叶逆变换,仍得到 \(f\)。
因此,只需对快速傅里叶变换的矩阵求逆,即可得到快速傅里叶逆变换的矩阵。
设 \(\omega\) 表示 \(\omega_n\),则
\[\mathcal F =\begin{bmatrix}(\omega ^ 0) ^ 0 & (\omega ^ 0) ^ 1 & \cdots & (\omega ^ 0) ^ {n – 1} \\(\omega ^ 1) ^ 0 & (\omega ^ 1) ^ 1 & \cdots & (\omega ^ 1) ^ {n – 1} \\\vdots & \vdots & \ddots & \vdots \\(\omega ^ {n – 1}) ^ 0 & (\omega ^ {n – 1}) ^ 1 & \cdots & (\omega ^ {n – 1}) ^ {n – 1} \\\end{bmatrix}\]
则 \((\mathcal F ^ {-1})_{ij} = [x ^ i] \prod_{k\neq j} \frac {x – \omega ^ k} {\omega ^ j – \omega ^ k}\)。
分子和分母均形如 \(g(x) = \frac {\prod_{0\leq k < n} (x – \omega ^ k)} {x – \omega ^ j}\),我们研究该函数的性质。
首先,因为 \(\omega ^ k(0\leq k < n)\) 为 \(x ^ n – 1 = 0\) 的 \(n\) 个互不相同的根,根据因式定理,\(\prod_{0\leq k < n} (x – \omega ^ k)\) 就等于 \(x ^ n – 1\)。感性理解:将 \(\prod_{0\leq k < n} (x – \omega ^ k)\) 展开,再应用单位根的 对称性。
模拟短除法 \(\frac {x ^ n – 1} {x – \omega ^ j}\),可知
\[g(x) = x ^ {n – 1} + \omega ^ jx ^ {n – 2} + (\omega ^ j) ^ 2x ^ {n – 3} + \cdots + (\omega ^ j) ^ {n – 1} x ^ 0\]
因此
\[(\mathcal F ^ {-1})_{ij} = \frac {[x ^ i] g(x)} {g(\omega ^ j)} = \frac {(\omega ^ j) ^ {n – 1 – i}} {n(\omega ^ j) ^ {n – 1}} = \frac {(\omega ^ {-j}) ^ {i}\omega ^ {-j}} {n\omega ^ {-j}} = \frac {\omega ^ {-ij}} {n}\]
这就说明
\[\mathcal F ^ {-1} =\frac 1 n\begin{bmatrix}(\omega ^ {-0}) ^ 0 & (\omega ^ {-0}) ^ 1 & \cdots & (\omega ^ {-0}) ^ {n – 1} \\(\omega ^ {-1}) ^ 0 & (\omega ^ {-1}) ^ 1 & \cdots & (\omega ^ {-1}) ^ {n – 1} \\\vdots & \vdots & \ddots & \vdots \\(\omega ^ {-(n – 1)}) ^ 0 & (\omega ^ {-(n – 1)}) ^ 1 & \cdots & (\omega ^ {-(n – 1)}) ^ {n – 1} \\\end{bmatrix}\]
因此,对一个序列做 IFFT,只需将 FFT 递归公式里面的 \(\omega_L ^ k\) 换成 \(\omega_L ^ {-k}\),并在最后将所有数除以 \(n\) 即可。
这就引出了 IDFT 公式及其对应矩阵:
\[x_n = \frac 1 N \sum_{k = 0} ^ {N – 1} X_k e ^ {\frac {2\pi i} Nkn} = \sum_{k = 0} ^ {N – 1} X_k \omega_N ^ {kn} \\\mathcal {F_D} ^ {-1} = \frac 1 N\begin{bmatrix}(\omega_N ^ 0) ^ 0 & (\omega_N ^ 0) ^ 1 & \cdots & (\omega_N ^ 0) ^ {N – 1} \\(\omega_N ^ 1) ^ 0 & (\omega_N ^ 1) ^ 1 & \cdots & (\omega_N ^ 1) ^ {N – 1} \\\vdots & \vdots & \ddots & \vdots \\(\omega_N ^ {N – 1}) ^ 0 & (\omega_N ^ {N – 1}) ^ 1 & \cdots & (\omega_N ^ {N – 1}) ^ {N – 1} \\\end{bmatrix}\]4.5 快速多项式乘法
通过 FFT 和 IFFT,我们可以在 \(\mathcal{O}(n\log n)\) 的时间内实现 \(n – 1\) 次多项式在系数表示法和点值表示法之间的转换。
计算两个次数分别为 \(n – 1\) 和 \(m – 1\) 的多项式 \(a, b\) 相乘,设结果为 \(c\),则 \(c\) 是 \(n + m – 2\) 次多项式,我们需要 \(n + m – 1\) 个点值才能确定它。根据点值的性质,首先找到不小于 \(n + m – 1\) 的最小的 \(2\) 的幂 \(L\),对系数表示法的 \(a, b\) 分别做长度为 \(L\) 的 FFT,将对应点值相乘得到 \(\hat c\),再对 \(\hat c\) 做 IFFT 还原 \(c\)。
首先我们需要实现一个复数类,它支持复数的加减乘运算。也可以使用 C++ 自带复数类 std::complex,用法见 CPP reference。
FFT 和 IFFT 大体上一致,只有一些细小差别。我们可以类似实现 FWT 和 IFWT 那样,用同一个函数实现它们,并用一个参数区别。
等式 \(\omega_n = \cos(\frac {2\pi} {n}) + i\sin(\frac {2\pi} {n})\) 帮助我们求出 \(n\) 次单位根。
- 注意浮点数的精度。当多项式系数的绝对值较大时,需使用
long double甚至 5.2 小节的任意模数卷积。
模板题 P3803 代码:
#include using namespace std;constexpr int N = 1 << 21;constexpr double pi = acos(-1);struct comp { double a, b; // a + bi comp operator + (const comp &x) const {return {a + x.a, b + x.b};} comp operator - (const comp &x) const {return {a - x.a, b - x.b};} comp operator * (const comp &x) const {return {a * x.a - b * x.b, a * x.b + b * x.a};}} f[N], g[N], h[N];int n, m, r[N];void FFT(int L, comp *f, bool type) { // L 表示长度, type = 1 表示 FFT, type = 0 表示 IFFT for(int i = 1; i > 1] >> 1) + (i & 1 ? L >> 1 : 0); if(i < r[i]) swap(f[i], f[r[i]]); } for(int d = 1; d < L; d <<= 1) { comp wd = {cos(pi / d), sin(pi / d)}; // 2d 次单位根 if(!type) wd.b = -wd.b; // IFFT 单位根取倒数, 相当于沿 x 轴对称 static comp w[N]; w[0] = {1, 0}; for(int j = 1; j < d; j++) w[j] = w[j - 1] * wd; // 用数组记录 0 ~ d-1 次单位根, 减少复数乘法次数 for(int i = 0; i < L; i += d << 1) { for(int j = 0; j < d; j++) { comp x = f[i | j], y = w[j] * f[i | j | d]; f[i | j] = x + y, f[i | j | d] = x - y; } } } if(!type) for(int i = 0; i > n >> m; for(int i = 0; i > f[i].a; for(int i = 0; i > g[i].a; int L = 1; while(L <= n + m) L <<= 1; FFT(L, f, 1), FFT(L, g, 1); for(int i = 0; i < L; i++) h[i] = f[i] * g[i]; FFT(L, h, 0); for(int i = 0; i <= n + m; i++) cout << (int) (h[i].a + 0.5) << (i < n + m ? ' ' : '\n'); return 0;}4.6 快速数论变换
前置知识:原根和阶。
我们将 DFT 的数值范围从复数域推广至任意存在 \(n\) 次单位根 \(\alpha\) 的环 \(R\),其中 \(\alpha\) 满足 \(\alpha ^ k(0\leq k < n)\) 互不相同,对 \(x_0, x_1, \cdots, x_{n – 1}\) DFT 得 \(X_0, X_1, \cdots, X_{n – 1}\),则
\[X_i = \sum_{j = 0} ^ {n – 1} x_j \alpha ^ {ij}\]
也可以视作 \(X_i = f(\alpha ^ i)\),其中 \(f(t) = \sum_{j = 0} ^ {n – 1} x_j t ^ j\)。
类似可知 IDFT
\[x_j = \frac 1 n \sum_{i = 0} ^ {n – 1} X_i \alpha ^ {-ij}\]
即 DFT 和 IDFT 对序列进行的变换的本质抽象。
4.6.1 算法介绍
快速数论变换即在模 \(p\) 意义下的整数域 \(F = \mathbb Z / p\) 进行的快速傅里叶变换。
设变换长度为 \(n\),则需存在 \(n\) 次单位根 \(a\) 满足 \(\delta_p(a) = n\)。大部分题目的模数 \(p\) 满足:
- \(p\) 为质数。
- \(2 ^ k\mid p – 1\),其中 \(2 ^ k\) 不小于最大的可能的 NTT 长度。
第一条性质保证 \(p\) 存在原根 \(g\) 且 \(n\) 可逆,第二条性质保证存在 \(n\) 次单位根。注意它不是充要条件,只是充分条件。
根据原根的性质,\(\delta_p(g) = p – 1\),即 \(g\) 的 \(0\sim p – 2\) 次幂互不相同,则 \(g\) 在 \(F\) 上的性质和复数域上 \(p – 1\) 次单位根的性质完全一致:\(g ^ k(0\leq k < p – 1)\) 和 \(\omega_{p – 1} ^ k(0\leq k < p – 1)\) 形成的域是同构的,\(g ^ k\) 等价于 \(\omega_{p – 1} ^ k\)。
因此,\(q = g ^ {\frac {p – 1} {n}}\) 等价于 \(\omega_{p – 1} ^ {\frac {p – 1} n}\) 即 \(\omega_n\),它的 \(0\sim n – 1\) 次幂互不相同,即 \(\delta_p(q) = n\),也可以通过阶的性质 \(\delta_p(g ^ k) = \frac {\delta_p(g)} {\gcd(\delta_p(g), k)}\) 说明。
常见 NTT 模数有:
- \(998244353 = 7\times 17 \times 2 ^ {23} + 1\),有原根 \(3\)。它可以用来做长度不超过 \(2 ^ {23}\) 的 NTT,也是最常见的模数。
- \(1004535809 = 479 \times 2 ^ {21} + 1\),有原根 \(3\)。
- \(469762049 = 7 \times 2 ^ {26} + 1\),有原根 \(3\)。
如果不是常见模数,我们需要检验 \(p\) 是否为形如 \(q2 ^ k + 1\) 的质数,\(2 ^ k\) 是否足够大,再运用原根相关的知识枚举并判定找到任意一个原根,就可以做 NTT 了。
注意以上只是模数 \(p\) 可 NTT 的充分条件,它的更弱的条件是存在 \(\delta_{p}(a) = n\) 和 \(n ^ {-1}\)。如果 NTT 是正解的一部分,那么一个合格的出题人应将 \(p\) 设为常见模数,因为模数不是考察重点。
4.6.2 代码实现
朴素 NTT 已经比 FFT 快了不少,因为复数运算很耗时。
接下来加入一些常数优化:
- 预处理 \(2d\) 次单位根的 \(0\sim d – 1\) 次幂,这样对每个 \(i\) 枚举 \(j\) 的时候就不需要重复计算单位根的幂。
- 用
unsigned long long和 \(16\) 次模一次的技巧,减少取模次数。类似技巧也用于优化矩阵乘法。
综上,写出如下代码(依然是 模板题):尽管题目没有要求取模,但可视为在模 \(p\) 意义下进行多项式乘法,其中 \(p\) 大于答案的每一项。
#include using namespace std;using ull = unsigned long long;constexpr int N = 1 <>= 1; } return s;}int n, m, r[N], f[N], g[N], h[N];void FFT(int L, int *a, bool type) { static ull f[N], w[N]; for(int i = 0; i > 1] >> 1) | (i & 1 ? L >> 1 : 0)]; for(int d = 1; d < L; d <<= 1) { int wd = ksm(type ? 3 : ivg, (mod - 1) / (d + d)); for(int j = w[0] = 1; j < d; j++) w[j] = 1ll * w[j - 1] * wd % mod; for(int i = 0; i < L; i += d << 1) { for(int j = 0; j < d; j++) { int y = w[j] * f[i | j | d] % mod; f[i | j | d] = f[i | j] + mod - y, f[i | j] += y; } } if(d == (1 << 16)) for(int p = 0; p < L; p++) f[p] %= mod; } int inv = ksm(L, mod - 2); for(int i = 0; i > n >> m; for(int i = 0; i > f[i]; for(int i = 0; i > g[i]; int L = 1; while(L <= n + m) L <<= 1; FFT(L, f, 1), FFT(L, g, 1); for(int i = 0; i < L; i++) h[i] = 1ll * f[i] * g[i] % mod; FFT(L, h, 0); for(int i = 0; i <= n + m; i++) cout << h[i] << (i < n + m ? ' ' : '\n'); return 0;}5. 应用与技巧
FFT 和 NTT 是所有快速多项式操作的基础。
设多项式 \(f\) DFT 得到 \(\hat f\),也记为 \(\operatorname {DFT}(f)\)。可以发现,DFT 是线性变换,因此它具有 线性性,这是它最重要且最常用的一个性质:
- \(c \operatorname {DFT}(f) + d \operatorname {DFT}(g) = \operatorname {DFT} (cf + dg)\)。
5.1 常数优化
在分析变换次数的时候,一般不区分 DFT 和 IDFT。
5.1.1 三次变两次优化
计算两 实系数 多项式 \(f, g\) 相乘。
根据 \((a + bi) ^ 2 = (a ^ 2 – b ^ 2) + 2abi\),将 \(f + gi\) 平方后取出虚部再除以 \(2\) 即可。
这样,三次 DFT 变成了两次 DFT,对常数有显著优化。代码。
这个优化被接下来稍复杂的技巧完全包含,它们的核心思想都是利用实系数的性质。
5.1.2 合并两次实系数 DFT
同时计算两 实系数 多项式 \(f, g\) 的 DFT。
类似地,我们设 \(u = f + ig\),\(v = f – ig\)。先求出 \(u\) 的 DFT \(\hat u\),考虑能否利用 \(\hat u\) 直接求出 \(\hat v\)。
在给出做法之前,我们还要引入一些复数相关的概念:
- 定义:对于两个复数 \(z_1\) 和 \(z_2\),若它们实部相等,虚部互为相反数,则称 \(z_1, z_2\) 互为 共轭复数。\(z_2\) 是 \(z_1\) 的共轭,\(z_1\) 是 \(z_2\) 的共轭。
- 表示:复数 \(z\) 的共轭记作 \(\overline {z}\) 或 \(\operatorname {conj}(z)\)。
- 运算性质:两个共轭复数的辐角互为相反数,即 \(\arg z_1 = -\arg z_2\)。根据棣莫弗定理,可知 复数积的共轭,等于它们共轭的积。这样理解:求共轭相当于把整个复平面沿 \(x\) 轴翻转,求积再翻转等价于翻转再求积。
- 易知复数和的共轭等于它们共轭的和,且一个复数的共轭的共轭等于它本身。
首先,\(v(\omega_n ^ k) = \sum_{i = 0} ^ {n – 1} v_i(\omega_n ^ k) ^ i\)。为了让它和 \(u\) 产生联系,因为 \(f, g\) 为实系数多项式,所以 \(u\) 和 \(v\) 的各项系数互为共轭,我们对整个结果求两次共轭,并将一次共轭根据共轭的性质下放至 \(v_i\) 和 \(\omega_n ^ k\)。
\[\begin{aligned}\hat v_k& = v(\omega_n ^ k) \\& = \sum_{i = 0} ^ {n – 1} v_i(\omega_n ^ k) ^ i \\& = \operatorname {conj} \left( \operatorname {conj} \left(\sum_{i = 0} ^ {n – 1} v_i(\omega_n ^ k) ^ i \right) \right) \\& = \operatorname {conj} \left( \sum_{i = 0} ^ {n – 1} \operatorname {conj}(v_i(\omega_n ^ k) ^ i) \right) \\& = \operatorname {conj} \left( \sum_{i = 0} ^ {n – 1} \operatorname {conj}(v_i)\operatorname {conj}(\omega_n ^ k) ^ i \right) \\& = \operatorname {conj} \left( \sum_{i = 0} ^ {n – 1} \operatorname {conj}(v_i)\operatorname {conj}(\omega_n ^ k) ^ i \right) \\& = \operatorname {conj} \left( \sum_{i = 0} ^ {n – 1} u_i (\omega_n ^ {n – k}) ^ i \right) \\& =\begin{cases}\operatorname {conj} (\hat u ^ {n – k}) & (1\leq k < n) \\\operatorname {conj} (\hat u_0) & (k = 0)\end{cases}\end{aligned}\]
求得 \(\hat v\) 之后,因为 \(\hat u = \hat f + i\hat g\),\(\hat v = \hat f – i\hat g\),所以 \(\hat f = \frac {\hat u + \hat v} {2}\),\(\hat g = \frac {\hat u – \hat v} {2i} = \frac {(\hat v – \hat u)i} {2}\)。
5.1.3 合并两次实系数 IDFT
这里实系数指 IDFT 后的各项系数为实数。如果是 IDFT 前的各项系数为实数,直接使用上一小节的技巧即可。
设需要 IDFT 的两个多项式为 \(\hat f\) 和 \(\hat g\)。计算 \(\operatorname {IDFT}(\hat f)\),各项系数均为实数,虚部信息被浪费了。考虑计算 \(\operatorname {IDFT}(\hat f + i\hat g)\),则各项系数的实部即 \(f\) 的系数,虚部即 \(g\) 的系数。
5.2 任意模数卷积
给定两多项式 \(f, g\),在系数模 \(p\) 意义下求出它们的卷积 \(h = f * g\)。
若 \(p\) 不是 NTT 模数,我们不能朴素地使用 FFT 求解该问题,因为 \(h\) 的系数可达 \(n p ^ 2\)。取 \(n = 10 ^ 6\),\(p = 10 ^ 9\),则 \(np ^ 2 = 10 ^ {24}\),long double 也无法接受。
接下来介绍两种常见的解决该问题的方法。它们也被称为 MTT(非正式),得名于毛啸 2016 年的集训队论文。
5.2.1 拆系数 FFT
设 \(B = \sqrt p\),将所有系数表示为 \(kB + r(0\leq r < B)\) 的形式,得到四个多项式 \(f = f_0B + f_1\),\(g = g_0B + g_1\),计算它们两两相乘的结果,则 \(fg = (f_0g_0) B ^ 2 + (f_0g_1 + f_1g_0)B + f_1g_1\)。
显然有一个四次 DFT 和三次 IDFT 的朴素做法:对 \(f_0, f_1, g_0, g_1\) 进行 DFT,\(\hat f_0\cdot \hat g_0, \hat f_0\cdot \hat g_1 + \hat f_1\cdot \hat g_0, \hat f_1 \cdot \hat g_1\) 进行 IDFT。
使用 6.1.2 和 6.1.3 的技巧,可以做到两次 DFT 和两次 IDFT。系数值域 \(nB ^ 2 = np = 10 ^ {15}\),勉强可以接受。
模板题 P4245 任意模数多项式乘法 的 代码。注意用 long double,double 会被卡精度,或者换一种精度较高的 FFT 写法。
5.2.2 三模数 NTT
前置知识:(扩展)中国剩余定理。
选取三个常用 NTT 模数,分别算出 \(f * g\) 在这些模数下的结果,再使用中国剩余定理合并即可。
我们选择 \(p_1 = 998244353\),\(p_2 = 1004535809\) 和 \(p_3 = 469762049\),设结果分别为 \(h_1, h_2, h_3\)。
如果使用 CRT,则需要 __int128,因为 \(h\) 的真实值为
\[(h_1p_2p_3\times \mathrm{inv}(p_2p_3, p_1) + h_2p_1p_3\times \mathrm{inv}(p_1p_3, p_2) + h_3p_1p_2\times \mathrm{inv}(p_1p_2, p_3)) \bmod (p_1p_2p_3)\]
使用 exCET 就不需要 __int128:
- 合并 \(h\equiv h_1\pmod {p_1}\) 和 \(h\equiv h_2\pmod {p_2}\)。设 \(h = h_1 + yp_1\),则 \(h_1 + yp_1 \equiv h_2\pmod {p_2}\),解得 \(y\in [0, p_2)\) 之后得到 \(h \equiv h_1 + yp_1 \pmod {p_1p_2}\),记作 \(h\equiv x\pmod {p_1p_2}\)。
- 合并 \(h \equiv x\pmod {p_1p_2}\) 和 \(h\equiv h_3 \pmod {p_3}\)。设 \(h = x + yp_1p_2\),类似解得 \(y\in [0, p_3)\),得到 \(h \equiv x + yp_1p_2\pmod {p_1p_2p_3}\)。因为 \(x + yp_1p_2 < p_1p_2p_3\),所以它就是真实值,可以直接取模。
效率比拆系数 FFT 低不少,因为进行了九次 DFT。代码。
5.3 分治 NTT
前置知识:CDQ 分治。
分治 NTT 在信息竞赛界应用广泛,这归功于他所解决的问题:形如 \(f_i = \sum_{j = 0} ^ {i – 1} f_j g_{i – j}\) 的 半在线卷积。
5.3.1 算法介绍
形如给定 \(g_1\sim g_{n – 1}\) 和 \(f_0\),求 \(f_1\sim f_{n – 1}\) 满足 \(f_i = \sum_{j = 0} ^ {i – 1} f_j g_{i – j}\) 的问题被称为 半在线卷积。因为 \(f_i\) 很大,一般会对 NTT 模数 \(p\) 取模。
我们不能通过简单的 NTT 解决这个问题,因为 \(f\) 的每一项均和之前项有关,这要求我们在尝试计算 \(f_i\) 时必须已经求出 \(f_0\sim f_{i – 1}\),而 NTT 做不到这一点。或者说,它们解决的问题形式不同。
这是一个在线的问题,考虑使用 CDQ 分治 转化为静态问题。
- 设当前分治区间为 \([l, r]\),其中 \(f_0 \sim f_{l – 1}\) 对 \(f_l\sim f_r\) 的贡献已经计算完毕。
- 若 \(l = r\),说明已经求出 \(f_l\),返回。
- 否则,令 \(m = \lfloor \frac {l + r} 2\rfloor\),先向左递归 \([l, m]\) 求解 \(f_l\sim f_m\)。
- 为了求解 \(f_{m + 1}\sim f_r\),我们需要计算 \(f_l\sim f_m\) 对它们的贡献:\(f_i = \sum_{j = l} ^ m f_j g_{i – j}\)。因为 \(f_l\sim f_m\) 已知,所以总的贡献相当于两个已知的多项式相乘的结果。具体地,令 \(f’_j = f_{j + l}(0\leq j \leq m – l)\),计算 \(h = f’ * g\),则 \(f_i\) 受到 \(h_{i – l}\) 的贡献。
- 向右递归 \([m + 1, r]\) 求解 \(f_{m + 1}\sim f_r\)。
因为 \(f, g\) 的长度均不超过区间长度,所以时间复杂度 \(\mathcal{O}(n\log ^ 2 n)\)。
模板题 P4721 分治 FFT 代码:
#include using namespace std;using ll = long long;using ull = unsigned long long;constexpr int N = 1 <= mod && (x -= mod);}int ksm(int a, int b) { int s = 1; while(b) { if(b & 1) s = 1ll * s * a % mod; a = 1ll * a * a % mod, b >>= 1; } return s;}int n, f[N], g[N];void solve(int l, int r) { if(l == r) return; int m = l + r >> 1, L = 1; solve(l, m); while(L < r - l + 1) L <<= 1; static int a[N], b[N], c[N]; memset(a, 0, L << 2); memcpy(a, f + l, m - l + 1 << 2); memcpy(b, g, L << 2); NTT(L, a, 1), NTT(L, b, 1); for(int i = 0; i < L; i++) c[i] = 1ll * a[i] * b[i] % mod; NTT(L, c, 0); for(int i = m + 1; i > n; for(int i = 1; i < n; i++) scanf("%d", &g[i]); f[0] = 1, solve(0, n - 1); for(int i = 0; i < n; i++) printf("%d%c", f[i], i + 1 < n ? ' ' : '\n'); return 0;}5.3.2 阶梯网格路径计数
阶梯网格路径计数是一类可以使用分治 NTT 解决的经典问题。
给定 \(n + 1\) 列 \(m + 1\) 行的网格图,左下角和右上角分别记为 \((0, 0)\) 和 \((n, m)\)。从 \((0, 0)\) 出发,每次只能向右或向上走,求走到 \((n, m)\) 的方案数。让我们回忆:方案数为 \(\binom {n + m} n\)。
当然,问题没有这么简单。我们限制第 \(i\) 列不能走到行数大于 \(c_i\) 的点,其中 \(c_i\) 单调不降,且 \(c_n = m\)。换言之,求出在一个阶梯网格从左下角走到右上角的方案数。
显然有 \(\mathcal{O}(nm)\) 的动态规划:设 \(f_{i, j}\) 表示走到 \((i, j)\) 的方案数,则 \(f_{i, j}\) 转移至 \(f_{i + 1, j}\) 和 \(f_{i, j + 1}\)。
考虑一段 \(c_i\) 相同的极长区间 \([l, r](l < r)\) 从 \(f_{l, j_1}\) 转移到 \(f_{r, j_2}\) 的贡献系数:为防止重复计数,从 \((l, j_1)\) 出发的第一步应当向右,因此有系数 \(\binom {(r – l – 1) + (j_2 – j_1)} {r – l – 1}\)。设 \(g_i\) 表示 \(\binom {r – l – 1 + i} {i}\),则 \(f_{l, j_1} g_i\to f_{r, j_1 + i}\),为卷积形式。
在不受 \(c_i\) 影响的时候,我们确实可以这样做。但是对于每个 \(i\),它内层的所有 \(j\) 之间也有转移,这让我们不方便借助分治和卷积加快整个过程。考虑进行一些等价转换便于分层。
稍作思考,设 \(f_{k, j}\) 表示走到 \((i, j)\) 其中 \(i + j = k\) 的方案数,则 \(f_{k, j}\) 转移至 \(f_{k + 1, j}\) 和 \(f_{k + 1, j + 1}\)。
进一步地,为了避免在 \(k > n\) 时受到 \(j\geq k – n\) 的限制,考虑从 \((n, 0)\) 开始沿左上方向把整个阶梯网格劈成两半,分别计算从 \((0, 0)\) 和 \((n, m)\) 到斜对角线上的点(\(i + j = n\))的方案数,而这两个问题是对称的。
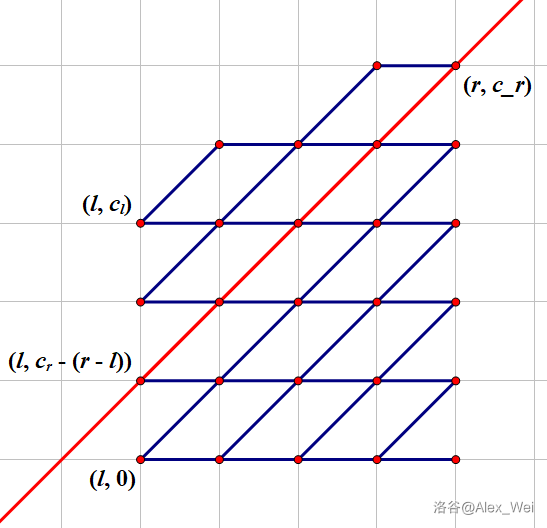
综合上述分析,我们将问题转化为:从 \((0, 0)\) 出发,每次可以向右或右上走一步,求走到最右侧一列每个点的方案数。其中,在第 \(i\) 列不能走到行数大于 \(c_i\) 的点。这个 \(c_i\) 可通过原问题的 \(c_i\) 进行简单转化得到,且容易证明其仍不降且满足很好的性质:\(c_{i + 1} – c_i \leq 1\)。
因此,从 \(f_l\) 推到 \(f_r\) 的时候,我们会发现对于 \(j\leq c_r – (r – l)\),设不等号右侧的数为 \(x\),\(f_{l, j}\) 对 \(f_r\) 的贡献不会受到 \(c\) 的影响:因为 \(c_{i + 1} – c_i\leq 1\),所以从 \((l, j)\) 开始,就算每一步都往右上走,也不会突破限制。这样,\(f_{l, 0}\sim f_{l, x}\) 对 \(f_r\) 的贡献可直接卷积计算。对于 \(f_{l, x + 1}\sim f_{l, c_l}\),分治下放至左右子区间 \((l, m]\) 和 \((m, r]\) 进行递归。
有了大致思路,设计算法就很简单了:设 \(\mathrm{solve}(l, r, \Delta, F)\) 表示当前区间为 \((l, r]\),传入多项式 \(F\) 的第 \(i\) 项表示 \(f_{l, i + \Delta}\),返回多项式 \(G\) 的第 \(i\) 项表示 \(f_{r, i + \Delta}\)。也可视作暂时将 \(c_l\sim c_r\) 全部减去 \(\Delta\),传入 \(f_l = F\),返回 \(G = f_r\),接下来就使用这种视角。
对于 \(j \leq c_r – (r – l)\),设不等号右侧的数为 \(x\),\(F_0\sim F_x\) 和 \(H_0\sim H_{r – l}\) 卷积求出 \(F_0\sim F_x\) 转移得到的 \(G_0\sim G_{c_r}\),其中 \(H_i\) 即转移系数 \(\binom {r – l} i\)。
对于 \(j > x\),分治下放:设 \(F’ = F_{x + 1}\sim F_{c_l}\),\(mid = \lfloor \frac {l + r} {2} \rfloor\),则先递归左半部分 \(F’\gets \mathrm{solve}(l, mid, \Delta + x + 1, F’)\),再递归右半部分 \(F’\gets \mathrm{solve}(mid, r, \Delta + x + 1, F’)\),则此时 \(F’\) 表示从 \(F_{x + 1}\sim F_{c_l}\) 转移得到的 \(G_{x + 1}\sim G_{c_r}\)。
两部分相加即得 \(G\),返回即可。
边界 \(r – l = 1\) 的处理是平凡的。
两次下传 \(F’\) 时,\(F’\) 的长度显然不超过 \(c_r – x = r – l\),因此在处理区间 \((l, r]\) 时涉及到的所有多项式的长度均不超过其父区间长度。设 \(n, m\) 同级,则时间复杂度为 \(\mathcal{O}(n\log ^ 2 n)\)。
接下来对问题进行一些扩展:
- 如果没有 \(c_{i + 1} – c_i\leq 1\) 的性质,但 \(c_i\) 单调不降,还能做吗?答案是可以,只需将 \(x\) 的定义改为 \(c_l – (r – l)\),此时 \((l, r]\) 涉及到的多项式长度不超过父区间的长度加上端点处 \(c\) 的差值,可以接受。
5.4 例题CF1770G Koxia and Bracket
相比于 F,这道题就略显套路了。
将左括号视为 \(1\),右括号视为 \(-1\),找到最后一个使得前缀和小于 \(0\) 的位置 \(lst\),则 \(s_1\sim s_{lst}\) 的每个左括号都有用,必然不会删去。同理,\(s_{lst + 1}\sim s_n\) 的每个右括号也都有用。
对于 \(s_1\sim s_{lst}\) 的每个右括号 \(s_i\),如果它对应的前缀和为 \(c_i\),则为保证前缀和非负,在 \(s_1\sim s_i\) 中至少需要删掉 \(-c_i\) 个右括号。我们只关心 \(-c_i\) 的前缀最大值,因为若这些位置满足条件,则所有位置满足条件,而每个前缀最大值一定会比先前的前缀最大值大 \(1\),所以我们将问题转化为:给定长为 \(m\) 的序列,其中有 \(c\) 个位置被打上了标记,求出选择 \(c\) 个位置的方案数,使得对于每个前缀,选择的位置数不小于被打上标记的位置数。
设 \(f_{i, j}\) 表示考虑到第 \(i\) 个位置,当前选择位置数减去打标记位置数的数量为 \(j\)。对于没有被打标记的位置 \(p\),\(f_{p – 1, j}\) 转移到 \(f_{p, j / j + 1}\),否则转移到 \(f_{p, j – 1 / j}\)。
非常明显的阶梯格路计数问题,稍有变形,不过解法大差不差,核心思想是一致的:考虑 \(f_l\) 转移到 \(f_r\),用卷积描述一部分转移,剩下来 \(\mathcal{O}(r – l)\) 个位置分别递归两侧处理。
对于本题,就是 \(f_{l, j}(j\geq cnt)\) 对 \(f_r\) 的贡献用卷积描述,其中 \(cnt\) 表示 \(l + 1\sim r\) 的被打上标记的位置。剩余部分递归,长度只有 \(cnt\),而且因为截取的是低位,我们甚至不需要记录偏移量 \(\Delta\)。
\(r – l = 1\) 的边界情况是平凡的。
\(s_{lst + 1}\sim s_n\) 的左括号类似处理即可。
每个分治区间涉及到的多项式长度不超过其父区间长度,因此时间复杂度为 \(\mathcal{O}(n\log ^ 2n)\)。代码。
参考资料
第一章:
- 复数 – OI Wiki。
- 复数 – 百度百科。
- [Video] 虚数的来源 – Veritasium。
- [Video] 【官方双语】微分方程概论 – 第五章:在 3.14 分钟内理解 \(e ^ {i\pi}\) – 3Blue1Brown。
第二章:
- 多项式与生成函数简介 – OI Wiki。
- 多项式 – 百度百科。
- 代数基本定理 – OI Wiki。
第四章:
- 快速傅里叶变换 – OI Wiki。
- FFT 理性瞎扯 – xtx1092515503。
- Vandermonde matrix – Wikipedia。
- Discrete Fourier transform – Wikipedia。
- 浅谈范德蒙德 (Vandermonde) 方阵的逆矩阵的求法以及快速傅里叶变换 (FFT) 中 IDFT 的原理 – Deadecho。
- 范德蒙德矩阵的逆矩阵怎么计算? – FFjet 的回答 – 知乎。
- Discrete Fourier transform over a ring – Wikipedia。
- NTT 与多项式全家桶 – command_block。
- [Video] 这个算法改变了世界 – Veritasium。
- [Video] The Fast Fourier Transform (FFT): Most Ingenious Algorithm Ever? – Reducible & B 站搬运。
第五章:
- P3803 题解 – NaCly_Fish。
- 2016 集训队论文《再探快速傅里叶变换》—— 毛啸。