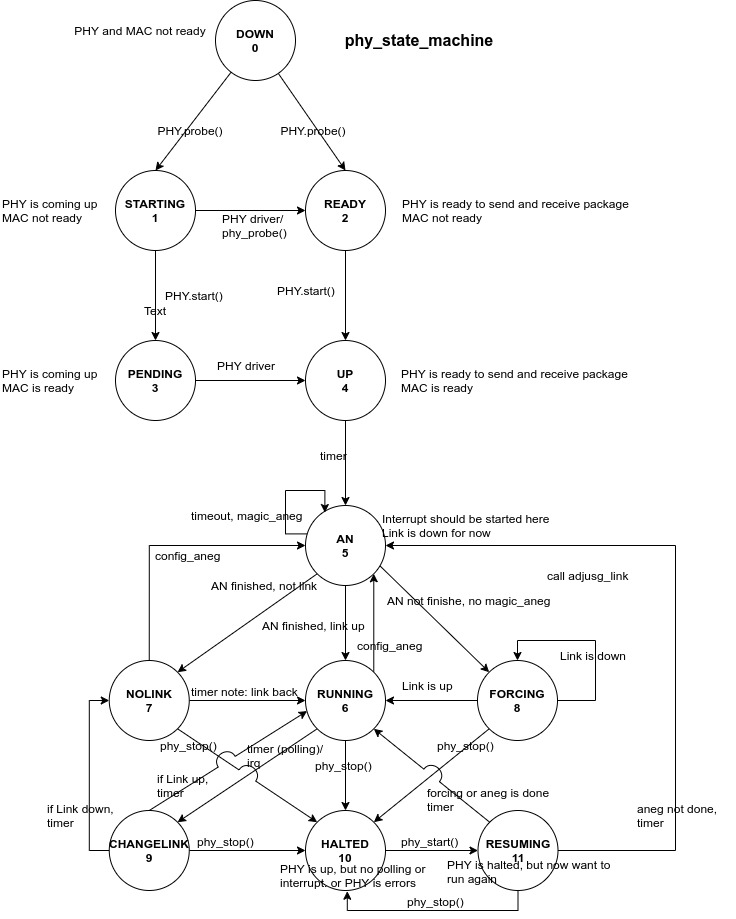
PHY的12种状态
enum phy_state {PHY_DOWN = 0, //关闭网卡PHY_STARTING, //PHY设备准备好了,PHY driver尚为准备好PHY_READY, //PHY设备注册成功PHY_PENDING, //PHY芯片挂起PHY_UP, //开启网卡PHY_AN, //网卡自协商PHY_RUNNING, //网卡已经插入网线并建立物理连接,该状态可切换到PHY_CHANGELINKPHY_NOLINK, //断网,拔掉网线PHY_FORCING,//自动协商失败,强制处理(读phy状态寄存器,设置速率,设置工作模式)PHY_CHANGELINK, //LINK检查,当物理连接存在时切换到PHY_RUNING,物理连接不存在时切换到PHY_NOLINKPHY_HALTED, //网卡关闭时,PHY挂起PHY_RESUMING //网卡开启时,PHY恢复};PHY状态机
PHY指PHY芯片,负责数据传送与接收所需要的电与光信号、线路状态、时钟基准、数据编码和电路等,并向数据链路层设备提供标准接口。
MAC指MAC芯片,属于数据链路层,提供寻址机构、数据帧的构建、数据差错检查、传送控制、向网络层提供标准的数据接口等功能。
PHY_DOWN: phy、phy driver、mac都没准备好
- 如果phy driver被集成在内核中,PHY.probe后,phydev状态为PHY_READY。
- 如果phy driver被未集成在内核中,PHY.probe后,phydev状态为PHY_STARTING。
PHY_READY:phy、phy driver已经就绪,mac未准备好
当MAC层加载时,在PHY.start后,phydev状态切换为PHY_UP。
PHY_STARTING:phy准备就绪,phy driver、mac未准备好
- 当MAC加载时,PHY.start后,phydev状态为PHY_PENDING。
- 当phy driver加载时,phydev状态为PHY_READY。
PHY_PENDING:phy、mac准备就绪,phy driver未准备好
当phy dirver加载后,phdev状态为PHY_UP
上图中0–>1–>2–>4、0–>2–>4代表phy、phy dirver、mac顺序加载。
0–>1–>3–>4代表phy、mac、phy driver顺序加载。
PHY_UP:phy、phy driver、mac准备就绪
当前状态将启动自动协商,若启动成功则进入PHY_AN,若启动失败则进入PHY_FORCING。
PHY_AN:网卡自协商模式,检测自协商是否完成。
先判断物理链路的状态,如果未LINK则进入PHY_NOLINK,如果LINK则判断自协商是否完成,
自协商完成进入PHY_RUNNING,若自协商超时则重新开启自协商。
PHY_FORCING:强制协商
读link和自协商状态寄存器,如果状态正常则进入PHY_RUNNING模式。
PHY_NOLINK:物理链路未连接
判断物理链路状态,如果LINK,再判断是否支持自协商,若支持待自协商完成后进入PHY_RUNNING模式,
若不支持,直接进入PHY_RUNNING模式。若自协商处于挂起状态,则进入PHY_AN模式。
PHY_RUNNING:正常运行中
获取当前link状态,当link状态发生改变时,进入PHY_CHANGELINK模式。
PHY_CHANGELINK:检查物理链路
物理链路link时,切换到PHY_RUNNING,非LINK时切换到PHY_NOLINK。
PHY_HALTED:网卡关闭phy_stop
挂起phy
PHY_RESUMING: 网卡启用phy_start
恢复phy
phy_state_machine是PHY的状态机函数
/** * phy_state_machine - Handle the state machine * @work: work_struct that describes the work to be done */void phy_state_machine(struct work_struct *work){struct delayed_work *dwork = to_delayed_work(work);struct phy_device *phydev =container_of(dwork, struct phy_device, state_queue);bool needs_aneg = false, do_suspend = false;enum phy_state old_state;int err = 0;int old_link;mutex_lock(&phydev->lock);old_state = phydev->state;if (phydev->drv->link_change_notify)phydev->drv->link_change_notify(phydev);switch (phydev->state) {case PHY_DOWN:case PHY_STARTING:case PHY_READY:case PHY_PENDING:break;case PHY_UP:needs_aneg = true;phydev->link_timeout = PHY_AN_TIMEOUT;break;case PHY_AN:err = phy_read_status(phydev);if (err link) {phydev->state = PHY_NOLINK;netif_carrier_off(phydev->attached_dev);phydev->adjust_link(phydev->attached_dev);break;}/* Check if negotiation is done. Break if there's an error */err = phy_aneg_done(phydev);if (err 0) {phydev->state = PHY_RUNNING;netif_carrier_on(phydev->attached_dev);phydev->adjust_link(phydev->attached_dev);} else if (0 == phydev->link_timeout--)needs_aneg = true;break;case PHY_NOLINK:if (phy_interrupt_is_valid(phydev))break;err = phy_read_status(phydev);if (err)break;if (phydev->link) {if (AUTONEG_ENABLE == phydev->autoneg) {err = phy_aneg_done(phydev);if (err state = PHY_AN;phydev->link_timeout = PHY_AN_TIMEOUT;break;}}phydev->state = PHY_RUNNING;netif_carrier_on(phydev->attached_dev);phydev->adjust_link(phydev->attached_dev);}break;case PHY_FORCING:err = genphy_update_link(phydev);if (err)break;if (phydev->link) {phydev->state = PHY_RUNNING;netif_carrier_on(phydev->attached_dev);} else {if (0 == phydev->link_timeout--)needs_aneg = true;}phydev->adjust_link(phydev->attached_dev);break;case PHY_RUNNING:/* Only register a CHANGE if we are polling or ignoring * interrupts and link changed since latest checking. */if (!phy_interrupt_is_valid(phydev)) {old_link = phydev->link;err = phy_read_status(phydev);if (err)break;if (old_link != phydev->link)phydev->state = PHY_CHANGELINK;}/* * Failsafe: check that nobody set phydev->link=0 between two * poll cycles, otherwise we won't leave RUNNING state as long * as link remains down. */if (!phydev->link && phydev->state == PHY_RUNNING) {phydev->state = PHY_CHANGELINK;dev_err(&phydev->dev, "no link in PHY_RUNNING\n");}break;case PHY_CHANGELINK:err = phy_read_status(phydev);if (err)break;if (phydev->link) {phydev->state = PHY_RUNNING;netif_carrier_on(phydev->attached_dev);} else {phydev->state = PHY_NOLINK;netif_carrier_off(phydev->attached_dev);}phydev->adjust_link(phydev->attached_dev);if (phy_interrupt_is_valid(phydev))err = phy_config_interrupt(phydev, PHY_INTERRUPT_ENABLED);break;case PHY_HALTED:if (phydev->link) {phydev->link = 0;netif_carrier_off(phydev->attached_dev);phydev->adjust_link(phydev->attached_dev);do_suspend = true;}break;case PHY_RESUMING:if (AUTONEG_ENABLE == phydev->autoneg) {err = phy_aneg_done(phydev);if (err 0 if AN is done. * Otherwise, it's 0, and we're still waiting for AN */if (err > 0) {err = phy_read_status(phydev);if (err)break;if (phydev->link) {phydev->state = PHY_RUNNING;netif_carrier_on(phydev->attached_dev);} else{phydev->state = PHY_NOLINK;}phydev->adjust_link(phydev->attached_dev);} else {phydev->state = PHY_AN;phydev->link_timeout = PHY_AN_TIMEOUT;}} else {err = phy_read_status(phydev);if (err)break;if (phydev->link) {phydev->state = PHY_RUNNING;netif_carrier_on(phydev->attached_dev);} else{phydev->state = PHY_NOLINK;}phydev->adjust_link(phydev->attached_dev);}break;}mutex_unlock(&phydev->lock);if (needs_aneg)err = phy_start_aneg(phydev);else if (do_suspend)phy_suspend(phydev);if (err dev, "PHY state change %s -> %s\n",phy_state_to_str(old_state), phy_state_to_str(phydev->state));queue_delayed_work(system_power_efficient_wq, &phydev->state_queue, PHY_STATE_TIME * HZ);}